Traffic Simulation
The PATH program is engaged in the development and use of traffic simulation models for a variety of research applications. Among these are tools that help transportation agencies, such as Caltrans, to effectively manage a complex and ever-changing transportation system. We do this by adapting cutting-edge techniques in traffic modeling, data science, and machine learning to the specific needs of modelers and planners. Below is a sample of projects in this area.
Operations Planning Toolbox (OPT)
OPT is a corridor simulation program designed to quickly assess the effectiveness of traffic management techniques such as ramp metering and managed lanes. OPT incorporates all of the functionality of its predecessor program — FREQ — and also adds new functionality, such as HOT lane policies.
The alpha version of OPT was releases in November 2021. It includes these features:
-
A configuration module with an intuitive user interface that allows building the road network, specifying input demands and outgoing traffic flows, modeling different types of traffic (e.g., SOVs, HOVs, trucks), defining policies for managed lanes, including HOV and HOT lanes, and setting ramp metering policies for HOV and LOV traffic.
-
A simulation module that handles multimodal traffic, implements lane changing behavior, and accepts outgoing flows in two formats – as off-ramp flows and as split ratios that determine the portions of traffic to be directed to off-ramps.
-
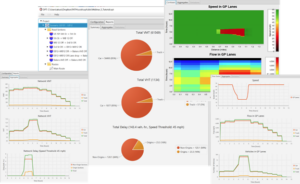
Reporting of simulation results in the form of pie charts for summaries, timeseries charts, and contour plots for spatio-temporal data. Simulation results can also be exported to Excel.
Links
Contact
Gabriel Gomes

Open Traffic Models (OTM)
OPT uses OTM as its computational core. OTM is a traffic simulation engine recently developed by PATH researchers for the purpose of advancing research in areas that are currently beyond the reach of most commercial simulators. OTM is a hybrid simulation framework, in the sense that it supports a wide variety of traffic models, including microscopic, mesoscopic, and macroscopic models – all acting simultaneously on a single network. OTM is also the first macroscopic simulator to be deployed in modern high-performance computing clusters. Tests of OTM on the Cori supercomputer at LBNL have demonstrated record simulation speeds for a macroscopic simulation [Gomes et. al. 2020]. Finally, OTM is an open-source project.
Links:
Contact: Gabriel Gomes

Simulation Model Development and Case Studies for Mixed Traffic Flow
The Connected Automated Vehicle (CAV) technology provides a powerful tool for the Infrastructure Owner Operator (IOO) to perceive the traffic flow states and implement advanced traffic management strategies. To take full advantage of this new technology, it is essential to understand the mobility and vehicle energy impacts of CAVs on mixed traffic flow under various traffic scenarios. However, it is not economically feasible to explore the CAV impacts via large-scale field tests. Tacking such a challenge calls for the development of a high-fidelity simulation framework that can accurately captures the dynamic interactions between CAV and other vehicles in mixed traffic streams. To build the simulation framework, PATH has adopted a technical approach that first generates car-following models of CAV based on datasets from small-scale CAV driving in real traffic. The CAV models are integrated into a simulation platform that contains a well-calibrated model of manually driven vehicles (MDV). With such an integration, the simulation platform is able to depict microscopic car-following and lane-changing behaviors of CAV, and their interactions with MDVs. In addition, the modeling framework also contains functions to model the cooperation of CAVs and infrastructure. This further enhances the capability of the simulation framework for depicting various traffic scenarios.
Contact: